“曲げながら触る”指の触覚特性を活かした体内への応用潜在性が高い最新技術!指向性マイクロフィンガーによる硬さの触診技術を開発
立命館大学理工学部の小西聡教授らの研究チームは、触覚センサを集積した指向性1を有するマイクロフィンガーによる弾性体内の硬さのある特異部を触診する技術が有効であることを明らかにしました。
※本研究成果は、2022年12月9日(日本時間)に、英科学雑誌「Scientific Reports」に掲載されました。
本研究は、さまざまな対象物の触診をはじめ柔らかさや硬さのある特異部の検出への応用が可能となります。特に、小さく柔らかいマイクロフィンガーは、狭小空間である生体内への低侵襲(体に負担の少ない)医療などへの応用潜在性が高いと考えられます。また、従来の検査技術と併用し、それぞれの特長を活かした診断技術を通して、生体内の腫瘍などの触診技術などへの応用、貢献が期待されます。さらにマイクロフィンガーは、人間の指と類似の動作が可能なため、ハプティックス2による触覚提示技術などとの連携も可能であり、医師等のオペレーション側との関係から拡張性、整合性も高いと考えられます。本研究における指向性マイクロフィンガー技術の医療現場での実装、実用化に向けて、現在、京都大学医学部附属病院 先端医療研究開発機構の「AMED橋渡し研究プログラム・シーズA」の支援を受けて応用プロジェクトを進めています。
【本件のポイント】
- 人間の指と類似の動作が可能なマイクロフィンガーを用いた触診技術を開発
- マイクロフィンガーの曲げ動作により得られる指向性の有効性を実証
- マイクロフィンガーの指向性を利用した物体内の硬さのある特異部を探索する手法を提案
- 狭小空間の生体内への低侵襲医療応用にも期待。ハプティックスによる触覚提示技術との連携も可能
研究成果の概要
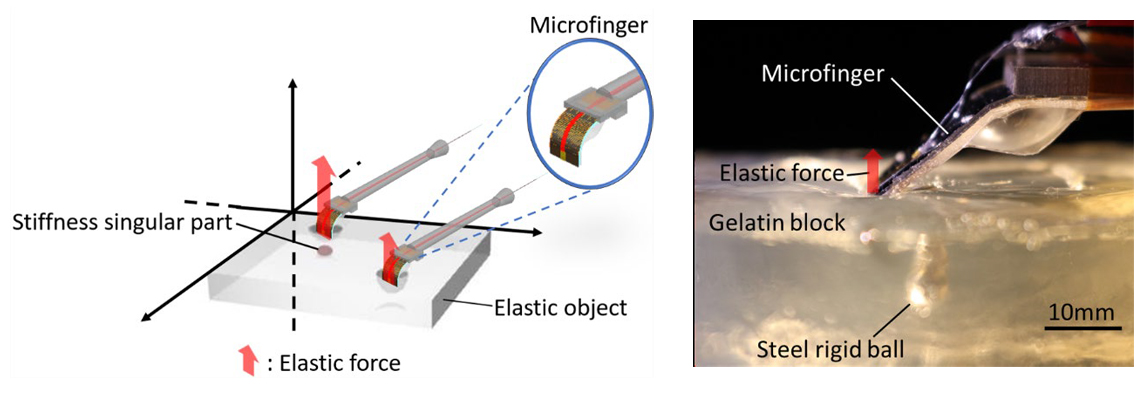
マイクロフィンガーは、小型で柔らかく、人工筋肉を内蔵しており、曲げ動作を行うことができます。また集積化した歪センサにより、マイクロフィンガーが接触対象から受ける反力を検知し、対象物体の柔らかさや硬さの情報を得ることができます。従来の振動型表面接触や直線的な押し込みの手法に対して、本研究では、マイクロフィンガーの「曲げて押し込むことができる指向性」を活かし、対象物体中深くに存在し、硬さ(弾性率)の異なる特異部の検出への有効性を示しました。また、物体表面からの検出において、指向性を活かした効率の良い「物体内の特異部探索が可能な触診技術」を提案しました。将来的には、生体内の腫瘍などの触診技術などへの応用も期待されます。
研究の背景
多くの触診技術は、接触部の直下への押し込みによる計測、物体表面状態の計測を可能にするものが主流でした。直下押し込み型の計測では検知範囲が限られるため、試料の特性解析に向いています。
また、物体表面状態の計測は、本研究が狙う10mm程度の深部にある特異部の計測には対応していませんでした。これに対して、本研究で用いたマイクロフィンガーは、曲げ動作による指向性、深部特異部の計測の両観点において新しい長所を有します。人の指を縮小した形態をとるマイクロフィンガーは、ハプティックスによる触覚提示技術への展開も容易となります。
研究の内容
シリコンラバー等のポリマーを主材とするマイクロフィンガーは薄くて柔らかく、人工筋肉を内蔵しており、曲げ動作を行うことができます。また集積化した歪センサにより、マイクロフィンガーが接触対象から受ける反力を検知することも可能です。本研究では、幅16mm、長さ40mm、厚さ850μmのマイクロフィンガーを用いました(マイクロフィンガーはニーズに応じて、柔軟に長さや幅を設計することが可能で、幅8mmも開発しています)。
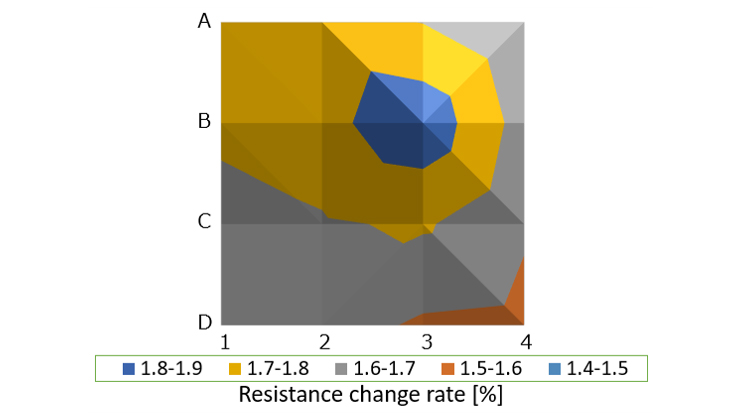
本研究では、このマイクロフィンガーの曲げ動作を用いて、ゼラチンの深さ10mmに埋め込まれた対象となる弾性体(剛球)に接触、押し込みを行い、対象物の硬さを計測することができました。また、複数の場所を押し込みながら、硬さの反力分布を計測し、対象物体中にある硬さ(弾性率)が異なる特異部を効率良く検出することも可能としました。複数の場所を計測して特異部を探索する場合、すべての場所を網羅的に探索することは効率的ではありません。一方、今回提案したマイクロフィンガーの指向性を用いれば、特異部の真上から離れた接触部からも、特異部の反力を検知することができます。本研究では、この指向性の特徴を活かした物体内の特異部探索が可能な触診技術も提案しました。
論文情報
- 論文名: Directional touch sensing for stiffness singularity search in an object using microfinger with tactile sensor
- 著者: Satoshi KONISHI, Yugo KAKEHI, Yuto HORI
- 発表雑誌:Scientific Reports
- 掲載日:2022 年 12 月 9 日(金)(日本時間)
- 掲載URL:https://www.nature.com/articles/s41598-022-25847-2
- DOI:https://doi.org/10.1038/s41598-022-25847-2
用語説明
※1 指向性:方向によって特性が異なり、ある方向に対して高い特性をもつこと。本研究ではマイクロフィンガーを曲げる方向に対して高い触診特性を有すること。
※2 ハプティックス:触覚フィードバック。操作者用のコントローラなどのマンマシンインタフェースを用いて触覚をフィードバックする技術。遠隔操作対象の装置からの触覚情報を操作者に伝える。
関連情報

運動能力のベースをつくる コオーディネーション運動
