子どもは生まれてからどのようにしてヒトの心や身体、コミュニケーションについて理解していくのか。板倉昭二は、「Developmental Cybernetics」という新たな研究領域を立ち上げ、ロボットを使った実証実験を通じてこの課題を探求し続けている。
子どもとヒト以外のエージェントとの相互作用と融合を研究
10ヵ月余りの間母親の胎内で成長し、初めて外の世界に生まれ出る赤ん坊は、一体どのようにヒトとしての心や認識を発達させていくのだろうか?
「Developmental Cybernetics(ディベロップメンタル・サイバネティクス)」という新しい研究領域を創出し、ロボットを使ってこの問いに答えを見出そうとしているのが、板倉昭二だ。「Developmental Cybernetics」は板倉が編み出した造語で、「子どもとヒト以外のエージェント(=行為の主体者)の相互作用と融合に関する研究」と定義される。「乳幼児は、コミュニケーション可能な機械やヒューマノイドロボット、あるいは幾何学図形などのエージェントとの関わりをどのように理解していくのか。それが分かれば、ヒトの『本質』が見えてくるのではないかと考えています」と板倉は研究動機を語る。
幼児はロボットの「視線」に人間らしさを見ている
板倉は、これまで「Developmental Cybernetics」における主要理論として「心」と「身体」、「コミュニケーション」に焦点を当て、乳幼児がそれらを理解していくプロセスとメカニズムを明らかにしてきた。「例えば乳幼児は、ロボットを社会的パートナーと認識しているのか?」と問いの一つを挙げる。
板倉によると、乳幼児に模倣能力があることはよく知られている。「Meltzoffによる新生児模倣に関する有名な実験で、乳児はヒトと機械のいずれの動作も真似るけれど、ヒトに対してのみ、その動作の意図や目的を理解して模倣していることが分かっています」と言う。板倉はヒト型のヒューマノイドロボットを用いて、Meltzoffの知見をさらに掘り下げる研究を行っている。
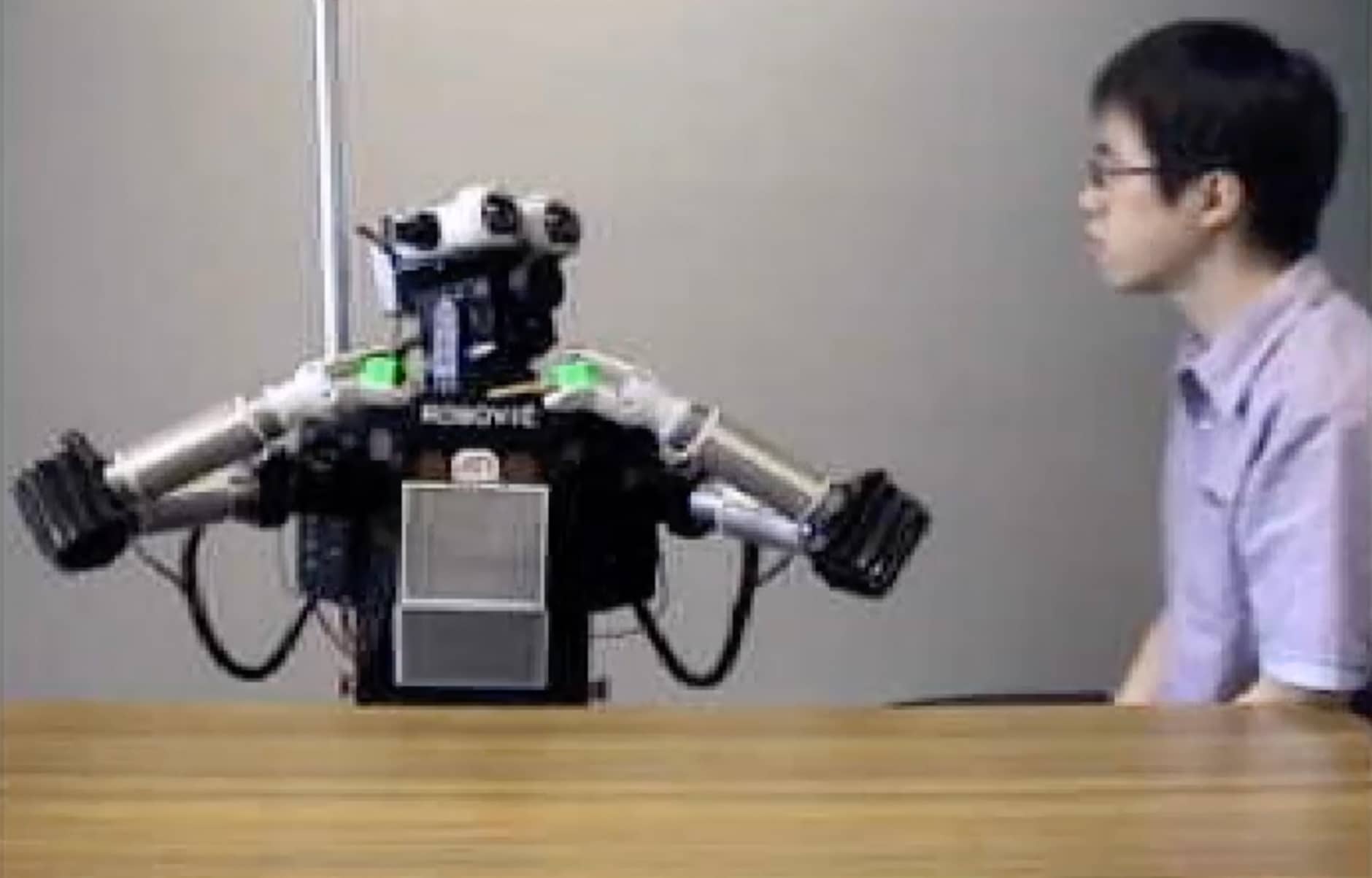
実験では、24~35ヵ月の幼児に、ロボットが社会的パートナー(成人)からダンベルのような物体を受け取り、二つに分割する映像を見せた後、その動作を真似るかを検証した。見せた映像は4種類。ロボットが動作を完遂した場合と失敗した場合、しかもそれぞれにおいてロボットが社会的パートナーとアイコンタクト(視線の交錯)した場合としなかった場合という条件を設定した。
実験の結果、社会的パートナーの映像を見せた場合は、その人が動作を完遂しても失敗しても幼児はその動作を完遂できることがわかった。「興味深かったのは、ロボットの映像を見せた場合でした。この時はロボットと社会的パートナーとの間にアイコンタクトがあった場合のみ、ロボットが失敗しても幼児は行動を完遂できたのです。この結果は、幼児がロボットの人間らしい形態ではなく、アイコンタクトという社会的シグナルを人間らしさと認識していることを示唆しています」
板倉はこの実験から、ヒトと関わるロボットに求められる機能についても重要な洞察を提示する。「アイコンタクトのような社会的シグナルで、乳幼児からヒトに対するのと同じ振る舞いを引き出せるとしたら、ヒトと関わるロボットがヒト型である必要はないかもしれない。もしかしたらそれこそが人間のコミュニケーションの本質かもしれません」
さらに板倉は奥村・鹿子木とともに、コミュニケーションにおける「視線」の重要性を明らかにした実験を行っている。ヒトは、他者の目線の先にあるものに同じように視線や注意を向ける「視線追従」という性質を持っており、発達段階の非常に早いうちからこの能力を身につけている。板倉らは実験で、乳幼児が、ヒトだけでなくロボットの視線も追従できることを実証した。しかし一方で、ヒトの視線だけが乳児の物体学習を促進することも明らかにしている。「実験で乳児は、ヒトが視線を向けた物体に対して認識力を高めるとともに選好を示しましたが、ロボットが視線を向けた物体に対しては、そうした処理や選好を示しませんでした。この結果は、ヒトからの学習の特異性を示唆しており、ヒトの社会的学習を支えるメカニズムの一つであると考えられます」と分析している。

子どもは人間の身体の形態・機能をどう理解し始めるのか
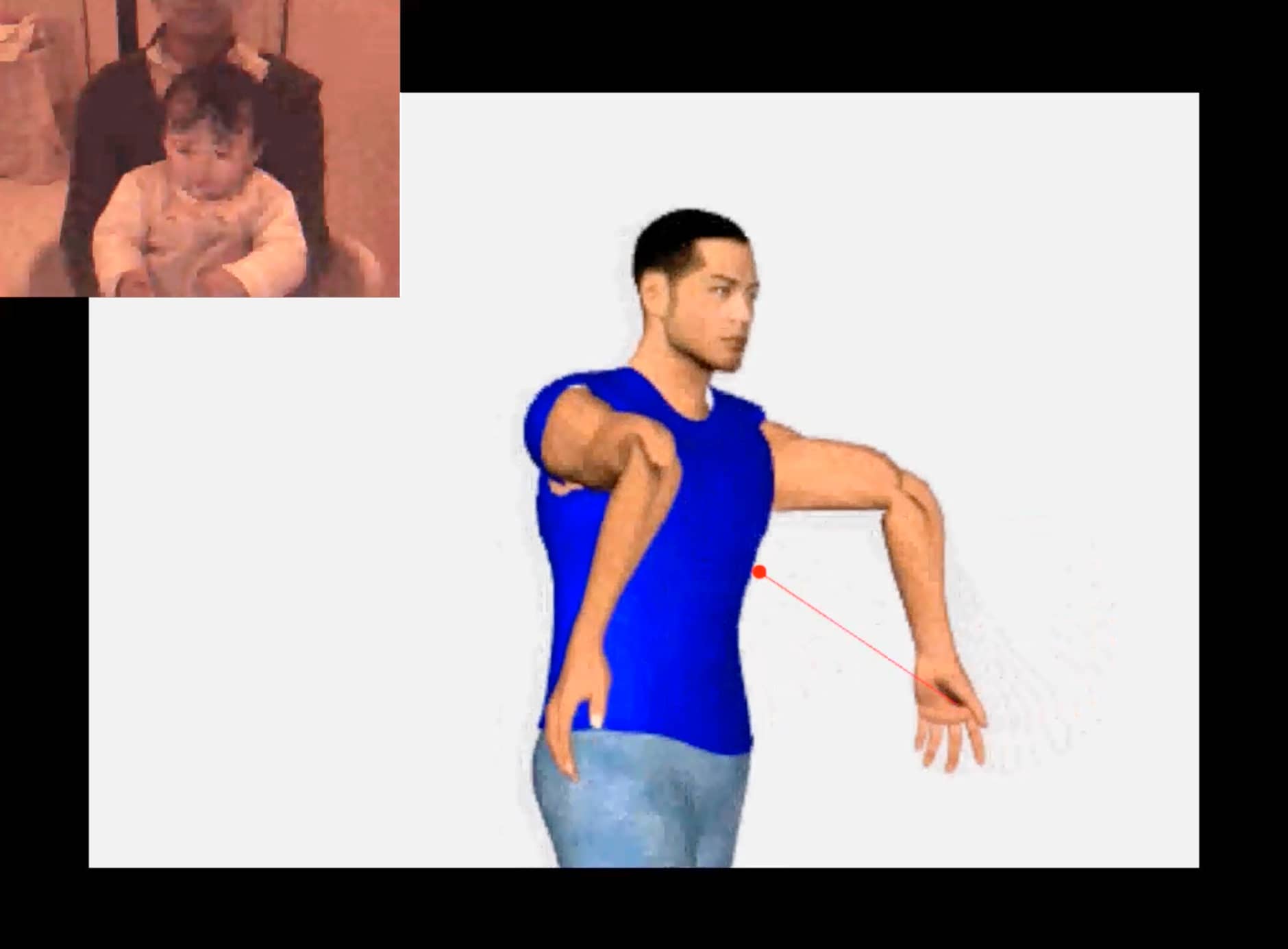
また板倉・守田は、子どもはヒトの身体の形態や機能をどのように理解し始めるのかについても探求している。乳児は比較的早い発達段階から人体の動きに関する知識を持っていることが知られている。板倉らは、9ヵ月と12ヵ月の乳児と成人を対象に実験を実施。ヒトとロボットが、それぞれヒトに可能な動き(肘が通常方向に曲がる)とヒトには不可能な動き(肘が後ろ側に曲がる)を行う映像を見せた。すると、12ヵ月の乳児と大人は、ヒトとロボットのいずれの場合も、不可能動作をする方をより長く注視したが、9ヵ月の乳児にそうした区別は見られなかった。つまり12ヵ月になると、ヒトに可能な動きをロボットにも適用するようになると考えられる。
「しかし情動変化を捉えるために瞳孔径を測定したところ、不可能動作を見た時に瞳孔径が大きくなったのは大人だけでした。この結果は、12ヵ月の乳児が人の身体構造上の機能を理解して不可能動作を注視したのではなく、単に見慣れていないものを見た、いわゆる新奇性効果に過ぎないと推察されます」
こうした研究は、子どもから望ましい反応を引き出すために、ロボットにはどのような機能が必要かについて重要な示唆を提示する。ロボットが日常生活の一部となり、子育てや教育に関わる存在となり得る時代に、板倉の「Developmental Cybernetics」の研究はますます大きく寄与することになるだろう。