お掃除ロボットやスマートスピーカーなど、家の中で人を助けるロボットが次々と登場している。その一方で、空間自体を知能化することで人を支援する「空間知能化」の研究も進んでいる。「ロボットが単体で働くのではなく、『空間』全体を『賢く』し、ロボットと連動させることで人間の要求を理解し、対応できるようにするというのがその考え方です」と説明した李周浩。空間に設置されたカメラやセンサが目や脳となり、人の動きや要求を認識するとともにネットワークで同じ空間内のデバイスとその情報を共有、ロボットなどとも連携して様々な情報提供やサービスを行おうというのだ。
空間を知能化する上でこれまで課題となってきたのが、センシング機器やデバイスを設置できる場所や数が限られることだったと李は明かす。「静的な空間では、一度センサやカメラ、デバイスなどを設置したら簡単に動かすことはできません。必要に応じて、人の方がセンサやデバイスの位置に合わせて移動せざるを得ませんでした」と言う。
人や物の位置が変化する動的な空間において、人ではなくセンサやデバイスが最適な位置に動き、要求に応じたサービスや支援を提供する。そうした知能化空間の実現を目指し、李は研究を続けてきた。現在開発を進めているのが、壁や天井を自在に動き回り、空間のレイアウトを再構成できる革新的な移動モジュールロボット「MoMo(モモ:Mobile Module)」である。
壁面や天井面を走行するロボットはこれまでにも開発されているが、それらの主要な技術課題はいかに重力に逆らってロボットを天井面に留まらせ、その状態を維持させるかというところにあった。そこで李は、従来とはまったく異なるコンセプトでMoMoの機構を考え出し、その課題をクリアしてみせた。ブレーク・スルーのポイントは、天井面側にロボットをつなぎとめるための仕掛けを作ったことだった。
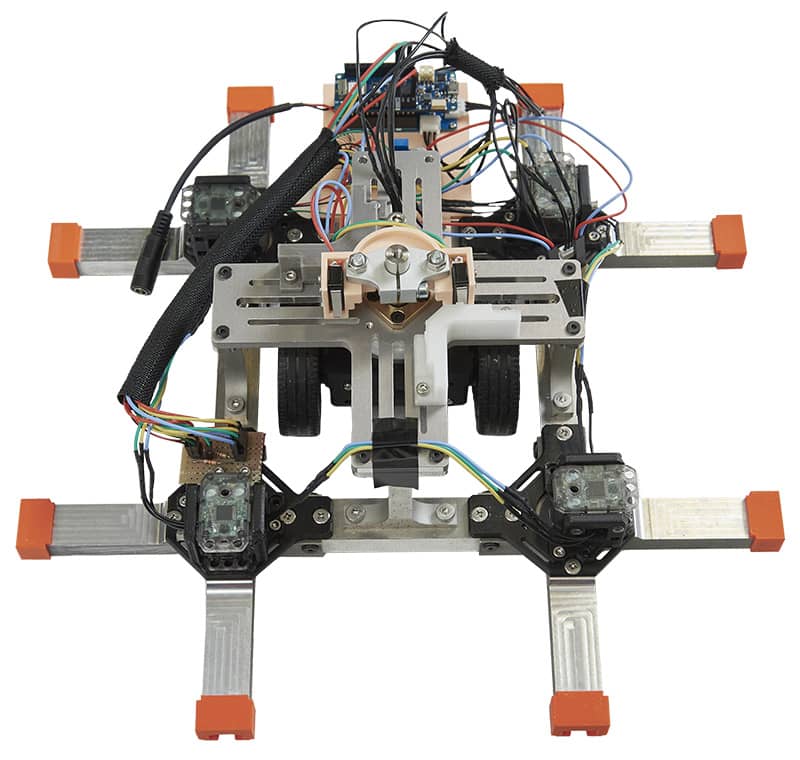
まず壁や天井に等間隔に突起を配置し、MoMo本体に取り付け![]() 型のレールが突起を掴むように結合することで、重力方向への落下を防ぐ。本体中央には全方向移動が可能な移動機構をつけ、上下左右への移動を可能にした。
型のレールが突起を掴むように結合することで、重力方向への落下を防ぐ。本体中央には全方向移動が可能な移動機構をつけ、上下左右への移動を可能にした。
この新しい機構によってこれまでの課題を克服するとさまざまなメリットが生まれるという。「壁に配置した突起に機械的に固定するため、MoMo本体の構造を極めてシンプルにできる上、自らの位置を保つためのエネルギーを必要としません。固定状態維持のためのエネルギーが必要な既存の壁面走行ロボットに比べて省エネで、かつ壁面の汚れや凹凸によって落下する心配もありません」と李は説明する。また等間隔に配置した突起は、ロボットの位置を正確に把握し、ポジショニングの誤差を防ぐことにも役立つ。
さらに李が開発した新機構は、レールを用いた既存の運搬ロボットとも一線を画する。「天井などに取り付けた運搬レールでモノを運ぶ仕組みが、病院や工場などで採用されていますが、これらは決まった軌道にしかモノを動かすことができないという問題があります。全方向にたくさんのレールを敷設するのは現実的ではないし、たとえ敷設できてもレールの交差点には切替などの複雑な機構が必要になります」。それに対して李は、壁や天井にではなくMoMo本体にレールを内蔵するといういわば逆転の発想で、四方への自在な移動を実現したのだ。
壁面走行ロボットの大きなメリットは、人と空間の住み分けを可能にするところにある。「人と同じ床面を利用するロボット家電は、人の移動を妨げる存在になり得ますが、壁面・天井を移動するMoMoなら、人と同じ空間を共有しながらも互いに干渉することなく、共存が可能です」と李は、人とロボットとの理想のあり方を示す。
MoMoは、実際どのような応用が可能なのか。「例えばMoMoにセンサやカメラ、さらに目的に応じたデバイスをつけることで、人がいる場所に照明を動かしたり、時計やプロジェクター、絵画を見えやすい位置に移動させるなど、人に合わせて部屋のレイアウトを自動で変更できるようになります。他にも人に寄り添って歩行補助具を動かすことで転倒を防いだり、椅子を取り付けて簡易的な階段昇降機として使ったり、居住空間で生活支援や介護にも役立てることができると考えています」と李。もちろん工場や商業施設などへの応用可能性は多様に広がる。
最新の実験機のサイズは345×345×55㎜で1.85kg、13.50cm/秒の速さで正確に移動できるところまで進化している。荷重実験では壁面で2kg、天井面でも1kgまで速度を落とさず走行できることを確認している。「いずれ用途に合わせ大型化、小型化も可能になります」と言う。
目下の課題の一つは、スピードだ。「壁面に車輪を接地させるために加重すると、突起とレールの摩擦力が増し、抵抗が生じるのが原因です。抵抗を解消するよう構造を改良し、走行スピードを向上させたい」と李。さらに現在は、壁面から天井へと別平面への移動を可能にする技術の開発にも挑んでいる。
「年齢や家族構成によって家に求められる機能は変わります。住んでいる人に合わせて最適な空間を実現し、年と共に機能を拡張していく。そんな知能化空間を実現したい」と李は構想する。あらゆる住居にMoMoが標準装備され、生涯を通じて暮らしをサポートする。そんな未来が到来するかもしれない。