人が足を踏み入れられない危険な場所で人に代わって探索・検査するロボット。
内径およそ75mmの細長いパイプの中をヘビのような細長い形のロボットが進んでいく。驚いたことに途中パイプが上下左右に折れ曲がっていても、詰まることなく曲がり、垂直方向にも這い上がっていく。ロボットを開発したのは馬書根と加古川篤だ。二人は災害現場など人間が足を踏み入れにくい場所でも活躍するロボットの開発に取り組んでいる。「災害現場で働くロボットの重要性が日本で強く認識されたのは、1995年の阪神・淡路大震災の時でしょう」と馬は振り返る。
古い木造家屋が集積した住宅地で多くの建物が倒壊し、一帯はがれきと化したため、救助活動は困難を極めた。下敷きになった人を捜索しようにも物を運び出そうにも思うように歩くことさえままならない。こうした都市型の災害の現場が二次災害を引き起こすのを防ぐために、人が物理的に入れない場所や危険な場所で人に代わって活動するロボットが求められている。
馬、加古川が開発したロボットは、見た目はヘビのようだが、その動きは生きているヘビとはまったく違う。「ヘビのように蛇行するのでは細長い配管内を走行しにくい。そこで細く狭い環境でも走行できるようにヘビのような構造を取り入れ、移動そのものは効率の良い車輪で行う方法を考えました」と加古川は説明する。
ロボットは関節で複数のボディをつなぎ合わせた構造になっており、先頭と最後尾、そして各関節部分に車輪が付けられている。特長は、前後の端に付けた車輪を旋回させることによって、狭い配管内でも進行方向を上下左右自在に変えられるところにある。例えばトレーラーのようにボディにあたる車両部分にしか車輪のない場合は、前後にしか推進力がはたらかないため横方向へは移動できない。この横方向への移動を可能にするのが前後の車輪というわけだ。配管の断面は円形になっているため、横方向の移動を配管内で行うとロボットは転がりながら進行方向を変えることができる。
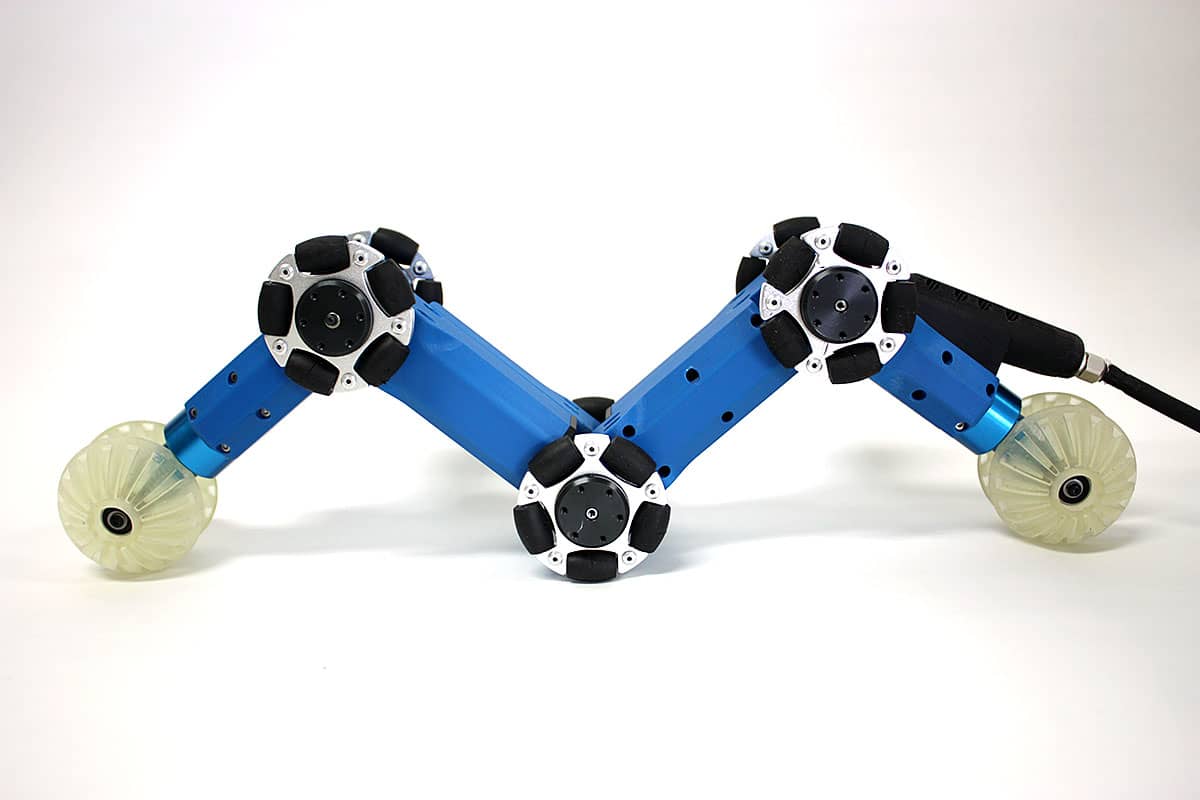
また関節で複数の駆動ユニットをつなぎ合わせることによって、狭い場所でも大きな駆動力を生み出すことができるだけでなく、必要に応じて連結部を増やし、モーターやカメラ、センサーなどさまざまなデバイスを搭載することができる。さらには従来のロボットより移動に必要なモーターが少なくて済むため、メンテナンスも容易になった。自律走行と遠隔操作の両方に対応できるようにし、5年以内の実用化を目指している。
「災害が起きる前に配管内を定期的に検査し老朽箇所や不備を見つけて惨事を防ぐことに役立てられます」と、加古川はその応用可能性を語る。
メカでできることはメカで実現する。災害現場ではそれが一番強い。
「メカでできることはメカで実現する。これが私たちのモットーです」と馬が語るように、馬、加古川らはできるだけ電子制御や情報システムを使わず、必要最小限のモーターと機械だけでロボットを駆動させることを考えている。どんなに緻密に作り上げてもソフトウェアはある一定の確率で誤作動を起こす。災害などの不測の事態にはなおさらだ。それに対して最も信頼性が高いのがやはり機械だという。
「最先端の技術を用いることが必ずしも最適なロボット開発につながるわけではありません。とりわけ災害用ロボットには、悪環境や不測の事態に対応できる柔軟性や強靭さが求められます。例えば車輪が段差にぶつかる力を利用して自らを回転させて段差を越えるなど、物理の原理を駆使し、環境に接触した時の反力を駆動に利用するよう設計すれば、余計なセンサーやアクチュエーターを必要とせず、その分丈夫で信頼性を高く保ち、かつ小型化や軽量化も可能になります。本研究室はこのように、数少ないセンサーとアクチュエーターで機械の力を最大限に引き出すことを研究室の研究方針としています」と加古川は説明を付け加える。
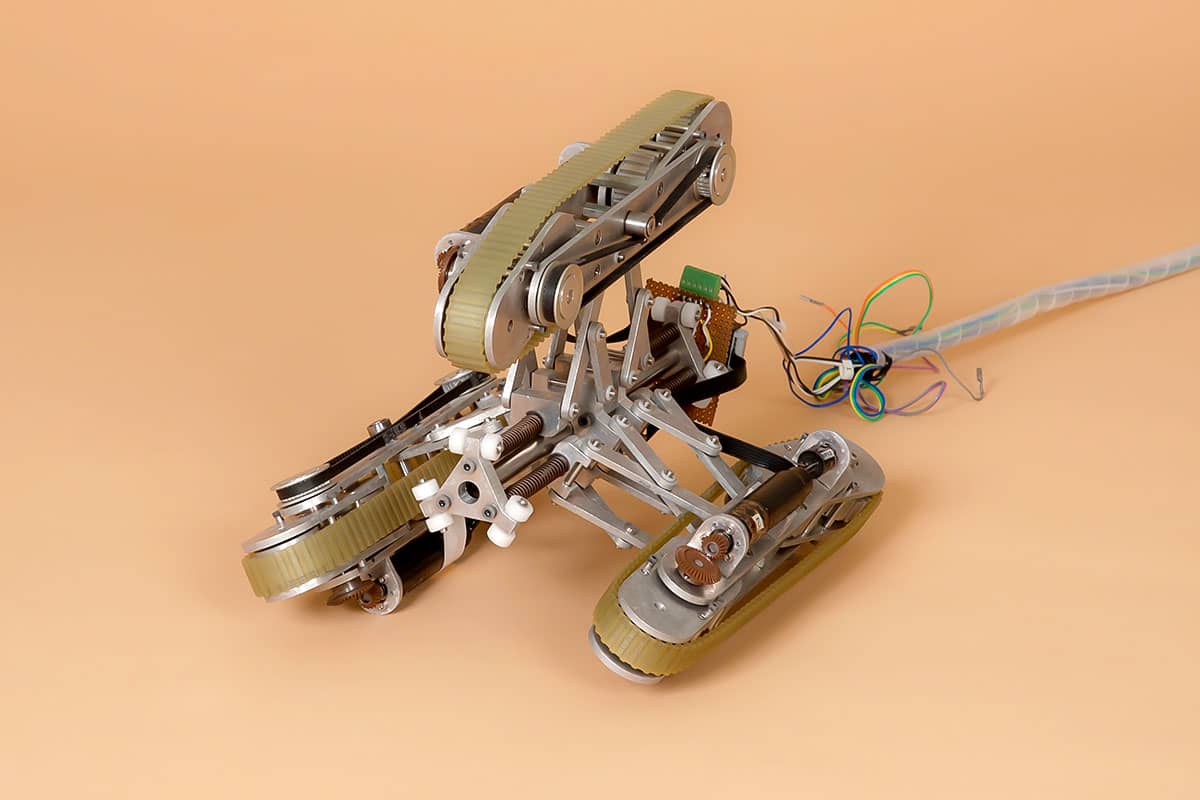
馬、加古川が開発した形状可変3モジュール型配管内検査ロボットにもそうした工夫が凝らされている。このロボットは、3つの独立した駆動モジュールを放射状に配置した構造を持つ。キャタピラー型のモジュールそれぞれに駆動源を搭載することで、3つは独立して駆動することができる。この3つのモジュールを同じ速度で駆動させると直進し、どれか一つを異なる速度に制御すると、車輪の回転の遅い方向に向かって旋回する。
加えて、配管内が詰まったり突然細くなった場合を想定して3つのモジュールの連結部をバネ状にし、広がったり縮んだりと形状を変えられるようにした。「障害物にぶつかると差動機構が働いて自律的に形状が小さくなるよう歯車数などを緻密に設計しました。これなら形状を変えるための駆動装置やセンサーを付ける必要がありません」
「モーターなどの駆動源をいかに減らし、小型化して消費電力を抑えるかは、私たちにとって永遠の命題です」と馬は語る。なぜならそれが災害現場での実用性を大きく左右するからだ。
垂直のガラスの壁面を登るユーモラスなロボットは、キャタピラーに取り付けた吸盤でガラスに吸い付きながら登っていく仕組みだが、ボディの重量を支えるための吸引ポンプは搭載していない。一般家庭によくあるプッシュ式吸盤フックの原理に目をつけた馬は、吸盤がガラスに吸い付き、かつスムーズに離れる仕組みをキャタピラーに取り入れた。一見無骨なその姿には、メカニカルなテクニックが詰まっているのだ。
また、らせん駆動型配管内検査ロボットは、通常前方向に進む車輪の他にボディのあちらこちらから3軸方向に車輪が飛び出している。中でもボディ前部のユニットに取り付けた3つの車輪を傾けた状態でスクリューのように回転させることで、らせんの軌道を描きながら進むことができる。「斜面の原理」を利用したネジと同じで少ない力で動かすことができるため、小型化に適している。


「大規模な津波や台風といった水害現場では、水没した場所や泥でぬかるんだ場所でも駆動できるロボットが必要です」2011年の東日本大震災を経て、馬、加古川は新たな課題に注力している。防水防塵仕様にするには、これまですでに開発したロボットであっても設計思想をゼロから考え直さなければならないという。ほとんどの場合、濡れてはならない箇所にシーリングを付けたり、ゴムでパッキングするといった後付けでは従来の構造や機能を維持することが不可能だからだ。現在、防水防塵仕様の3モジュール型配管内検査ロボットの開発に成功している。
「私たちの目標は、あくまで現実の災害現場で役に立つロボットをつくることです」という馬の言葉通り、二人は研究に留まらず実現性をとことん追求していく。彼らのロボットの一日も早い実用化が待たれる。