マイクロフィンガーを用いたダンゴムシの力計測に世界で初めて成功~ミクロ世界とのインタラクションのためのインタフェースとして期待~
立命館大学理工学部の小西聡教授の研究チームは、独自の触覚センサを有したマイクロフィンガーを操作してダンゴムシに触れ、反応したダンゴムシの脚力(数mN)、胴体力(最大15mN)を計測することに成功しました。開発したマイクロフィンガーは、長さ12mm、幅3mm、厚さ490μmで、シリコンラバー製の柔らかい人工筋肉の圧力駆動によって動き、液体金属を用いた柔軟な歪センサを内蔵しています。本研究成果は、2022年10月10日(現地時間)に、「Scientific Reports」(オンライン版)に掲載されました。
【本件のポイント】
- 独自の触覚機能を有したマイクロフィンガーを用いて、小さな生き物(今回はダンゴムシを採用)へのやさしい能動接触および力計測に世界で初めて成功。
- ソフトマイクロマシンであるマイクロフィンガー(長さ12mm、幅3mm、厚さ490μm)は、シリコンラバー製で柔らかく、圧力駆動の人工筋肉マイクロアクチュエータによって曲げ動作が可能。この動作により小さな生き物に能動的にやさしく触れ、刺激をすることが可能に。
- マイクロフィンガーには、液体金属配線を用いた柔らかな歪センサが内蔵され、自らの姿勢を検知。このセンサにより、小さな生き物からの力を計測することが可能。
研究成果の概要
触覚センサを内蔵したマイクロフィンガーを用いて、能動的にダンゴムシと接触し、反力を計測することに成功しました。脚力は数mN程度、胴体力は最大で15mNを計測し、体重依存性についても考察しています。体重によって脚力や胴体力に差があるかを調べ、胴体力については差がみられました。
今回用いたマイクロフィンガーは、遠隔操作および触覚提示機能を有するマイクロフィンガーロボットシステムの要素技術として開発しており、将来的には計測した力をオペレータにフィードバック提示することも可能になります。
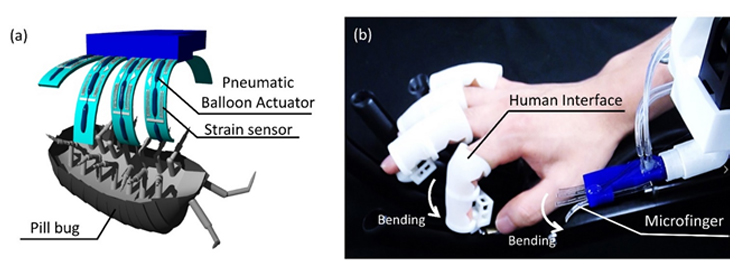
(a)マイクロフィンガーとダンゴムシの能動接触計測イメージ図
(b)マイクロフィンガーと遠隔操作用ヒューマンインタフェース。本研究では、一本のマイクロフィンガーを抽出した計測系を用いて実施。
(引用:https://doi.org/10.1038/s41598-022-21188-2)
研究の背景
昆虫等の小さな生き物の力計測に関する研究は、計測自体を目的として実験系を構成したものがほとんどでした。本研究においても、これまではマイクロフィンガーロボットシステムを用いて表面状態(凸凹)をなぞりながら計測し、オペレータに提示する等のデモンストレーションにとどまっていました。
今回ダンゴムシを対象とした動機の1つは、20年以上前の衝撃に遡ります。マイクロマシンの観察用に初めて購入したデジタル顕微鏡のデモの際、ダンゴムシを学生と一緒に観察しました。ディスプレイに映し出された小さな生き物の14本の足の動きに一同衝撃を受け、そのときの衝撃が今回の研究の動機に大いに繋がっています。
研究の内容
研究対象にダンゴムシを取り上げ、能動的に対象と接触し、その反応を力計測する機能を有したマイクロフィンガーを用いました。身近な小さな生き物であるダンゴムシは、今回用いた数mm程度の大きさのマイクロフィンガーのサイズの整合性が良く、なにより14本の足の動きが魅力です。マイクロフィンガーとの接触確率も高いため、計測信号からも動作が想像しやすい対象です。
ソフトマイクロマシンであるマイクロフィンガーの特長を活かして、やさしくダンゴムシに能動接触し、数mN程度の反応を計測することに成功しました。人と小さな生き物のインタラクションへの展開を念頭にしたアプローチであり、ユニークな研究といえます。
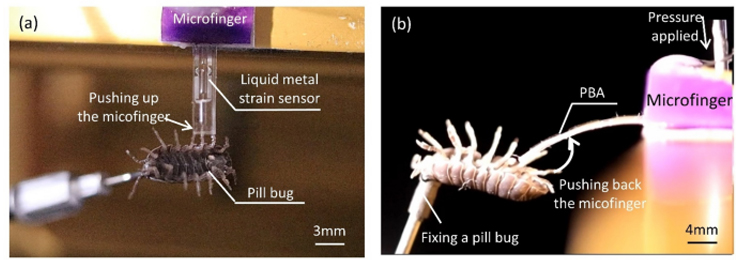
(a) 脚力計測 (b) 胴体力計測
(引用:https://doi.org/10.1038/s41598-022-21188-2)
社会的な意義
ソフトマイクロマシンである我々のマイクロフィンガーは、有望な応用として低侵襲医療応用がしばしば話題になります。一方今回の成果は、拡張現実技術の一つとして小さな手を手に入れたら何がしたいかというテーマに取り組んだ成果であり、エンターテインメントの世界とも近いと感じています。原寸大の手による遠隔操作、触覚提示とは異なり、「人の手では入れない空間」へのアプローチが期待できます。
小西聡教授のコメント
虫眼鏡で覗いていた世界に手だけでも入り込んだらどんな感じだろうという好奇心がダンゴムシと触れ合えるマイクロフィンガーを実現した動機の一つになります。
触覚を備えた小さな指をオペレータがインタフェースを用いて操縦して小さな生き物を押して刺激し、押された小さな生き物が押し返してくる。小さな生き物の押し返す動作をオペレータがインタフェースを通して感じることができる。まずはワクワクして、是非その先を一緒に考えてくれる仲間が増えると嬉しいです。
論文情報
- 論文名: Active tactile sensing of small insect force by a soft microfinger toward microfinger-insect interactions
- 著者: Satoshi Konishi, Fuminari Mori, Yugo Kakehi, Ayano Shimizu, Fumiya Sano, Kodai Koyanagi
- 発表雑誌:Scientific Reports
- 掲載URL:https://www.nature.com/articles/s41598-022-21188-2
- DOI:https://doi.org/10.1038/s41598-022-21188-2
関連情報

先端総合学術研究科 岸政彦教授の編著『東京の生活史』が第76回毎日出版文化賞を受賞
